Synchronization of simple data, such as boolean, float or integer values, over network. More...
#include <DataSync.hh>
Classes | |
| struct | Impl |
Public Member Functions | |
| void | addData (std::shared_ptr< SyncData > d) |
| Adds a data container to be synchronized by the instance. | |
| void | addData (SyncData *d) |
| Adds a data container to be synchronized by the instance. | |
| void | update () |
| Exchanges old data with newly received data in all associated data containers. | |
| void | processMessage (Message m) override |
| Receives data values and sets the associated container. | |
| void | send (SyncData *d) |
| Synchronizes the specified data object. | |
| char | getProtocolFlag () override |
| Returns the header byte associated with the protocol, sent in the header of messages to indicate which protocol instance to call for interpretation and processing. | |
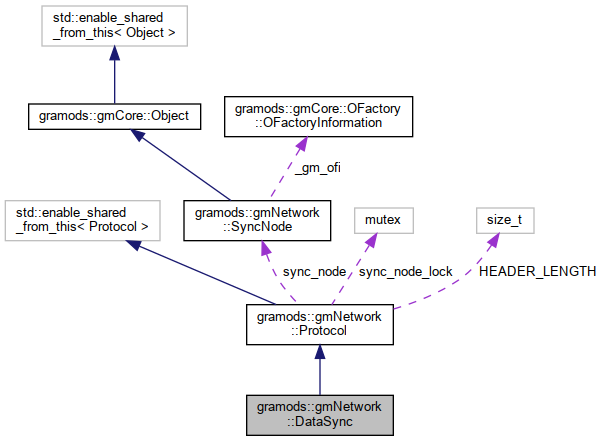
 Public Member Functions inherited from gramods::gmNetwork::Protocol Public Member Functions inherited from gramods::gmNetwork::Protocol | |
| virtual void | lostPeer (size_t idx) |
| Called by the sync node when connection to one of the peers has been broken. | |
| void | setSyncNode (SyncNode *sync_node) |
Additional Inherited Members | |
| Static Public Attributes inherited from gramods::gmNetwork::Protocol | |
| static const size_t | HEADER_LENGTH = Message().getHeader().size() |
| Protected Member Functions inherited from gramods::gmNetwork::Protocol | |
| void | sendMessage (std::vector< char > data) |
| Convenience method for creating a message and sending this to all peers. | |
| size_t | getLocalPeerIdx () |
| Convenience method for quering the SyncNode for the local peer idx. | |
| std::set< size_t > | getConnectedPeers () |
| Convenience method for quering the SyncNode for the currently connected peers. | |
| Protected Attributes inherited from gramods::gmNetwork::Protocol | |
| SyncNode * | sync_node |
| The SyncNode instance this protocol communicates through or nullptr if it has gone out of scope. | |
| std::mutex | sync_node_lock |
| Lock for synchronizing the sync_node pointer. | |
Detailed Description
Synchronization of simple data, such as boolean, float or integer values, over network.
OBSERVE: The data sharing currently assumes, but does not test, that the peers have the same endianness.
The data synchronization applies these principles:
- The data containers are double buffered - data are set to the back buffer and read off the front buffer.
- Data are sent over network to all peers as soon as they are set and it is up to the client code to make sure that the peers do not overwrite each other's data.
- It is up to the client code to call update() when it is done writing new data and want to use these data, and it is also up to the client code to make sure that all peers are in the same stage of execution so that this update leads to consistent behaviour.
Typical usage
Global variables:
Initialize:
Use:
Member Function Documentation
◆ addData() [1/2]
| void gramods::gmNetwork::DataSync::addData | ( | std::shared_ptr< SyncData > | d | ) |
Adds a data container to be synchronized by the instance.
Subsequently setting the value of the specified container will send that value to the connected peers, and a received value will be set. Call update to make received values current.
Observe that all connected peers must have the exact same associated data containers.
◆ addData() [2/2]
| void gramods::gmNetwork::DataSync::addData | ( | SyncData * | d | ) |
Adds a data container to be synchronized by the instance.
Subsequently setting the value of the specified container will send that value to the connected peers, and a received value will be set. Call update to make received values current.
Observe that all connected peers must have the exact same associated data containers.
WARNING: the caller MUST make sure that the pointer is valid during the lifetime of this object.
◆ getProtocolFlag()
|
inlineoverridevirtual |
Returns the header byte associated with the protocol, sent in the header of messages to indicate which protocol instance to call for interpretation and processing.
Reimplemented from gramods::gmNetwork::Protocol.
◆ processMessage()
|
overridevirtual |
Receives data values and sets the associated container.
Reimplemented from gramods::gmNetwork::Protocol.
◆ send()
| void gramods::gmNetwork::DataSync::send | ( | SyncData * | d | ) |
Synchronizes the specified data object.
This method is automatically called when the value of a SyncData is set and should not be used by client code.
◆ update()
| void gramods::gmNetwork::DataSync::update | ( | ) |
Exchanges old data with newly received data in all associated data containers.
The documentation for this class was generated from the following files:
- /home/karlu/private/program/gramods/modules/gmNetwork/include/gmNetwork/DataSync.hh
- /home/karlu/private/program/gramods/modules/gmNetwork/src/DataSync.cpp