|
Candy
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Groups Pages
|
Candy
|
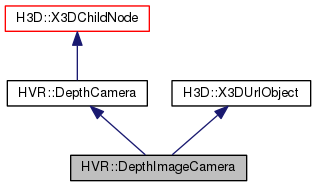
The depth camera uses an image to simulate a depth camera. More...
Classes | |
| class | URLImage |
Public Types | |
|
typedef H3D::TypedMFNode < H3D::H3DImageLoaderNode > | MFImageLoader |
 Public Types inherited from HVR::DepthCamera Public Types inherited from HVR::DepthCamera | |
|
typedef H3D::H3DImageObject::SFImage | SFImage |
|
typedef H3D::TypedSFNode < Candy::PaintTexture > | SFPaintTexture |
| typedef std::vector< H3D::Vec3f > | contour_t |
| typedef std::vector< contour_t > | contours_t |
Public Member Functions | |
| H3D_API_EXCEPTION (CouldNotLoadImage) | |
| DepthImageCamera (H3D::Inst< H3D::SFNode > _metadata=0, H3D::Inst< H3D::SFVec2f > _fieldOfView=0, H3D::Inst< ViewSize > _viewSize=0, H3D::Inst< H3D::SFBool > _updateBackground=0, H3D::Inst< H3D::SFFloat > _maximumBackgroundDistance=0, H3D::Inst< H3D::SFFloat > _backgroundDepthMargin=0, H3D::Inst< H3D::SFInt32 > _backgroundPixelMargin=0, H3D::Inst< URLImage > _depthData=0, H3D::Inst< SFPositionImage > _positionData=0, H3D::Inst< SFBackgroundImage > _depthDataBackground=0, H3D::Inst< SFPaintTexture > _debugTexture=0, H3D::Inst< H3D::MFString > _url=0, H3D::Inst< MFImageLoader > _imageLoader=0) | |
| Public Member Functions inherited from HVR::DepthCamera | |
| DepthCamera (H3D::Inst< H3D::SFNode > _metadata=0, H3D::Inst< H3D::SFVec2f > _fieldOfView=0, H3D::Inst< ViewSize > _viewSize=0, H3D::Inst< H3D::SFBool > _updateBackground=0, H3D::Inst< H3D::SFFloat > _maximumBackgroundDistance=0, H3D::Inst< H3D::SFFloat > _backgroundDepthMargin=0, H3D::Inst< H3D::SFInt32 > _backgroundPixelMargin=0, H3D::Inst< SFImage > _depthData=0, H3D::Inst< SFPositionImage > _positionData=0, H3D::Inst< SFBackgroundImage > _depthDataBackground=0, H3D::Inst< SFPaintTexture > _debugTexture=0) | |
| virtual std::string | defaultXMLContainerField () |
| H3D::Vec3f | pixel2DtoLine (float x, float y) |
| Convert a pixel coordinate on the Kinect image into a 3D line representing that pixels direction from the Kinects point of view. More... | |
| H3D::Vec3f | pixel2Dto3D (float x, float y, float d) |
| Convert a pixel coordinate on the Kinect image and depth value into a 3D position from the Kinects point of view. More... | |
| H3D::Vec3f | pixel2Dto3D (H3D::Vec3f p) |
| Convert a pixel coordinate on the Kinect image (x,y,depth) into a 3D position from the Kinects point of view. More... | |
| H3D::Vec3f | point2DtoLine (float x, float y) |
| Convert a point on the Kinect image into a 3D line representing that pixels direction from the Kinects point of view. More... | |
| H3D::Vec3f | point2Dto3D (float x, float y, float d) |
| Convert a point on the Kinect image into a 3D position from the Kinects point of view. More... | |
| H3D::Vec3f | point2Dto3D (H3D::Vec3f p) |
| Convert a point on the Kinect image into a 3D position from the Kinects point of view. More... | |
| const std::vector< Shape > & | getShapes () |
| H3D::Vec2f | getExtremes () |
| Returns a 2D vector containing the largest and smallest value of the depth in x and y, respectively. More... | |
| const ExtremesMap & | getExtremesMap () |
| Returns a map of extremes. More... | |
Public Attributes | |
| std::auto_ptr< MFImageLoader > | imageLoader |
| Public Attributes inherited from HVR::DepthCamera | |
| struct HVR_API | Shape |
| struct HVR_API | ExtremesMap |
| std::auto_ptr< H3D::SFVec2f > | fieldOfView |
 This camera field of view is used when converting coordinates between 2D and 3D. More... This camera field of view is used when converting coordinates between 2D and 3D. More... | |
| std::auto_ptr< ViewSize > | viewSize |
 This field holds the width and height of the view at the distance of one length unit. More... This field holds the width and height of the view at the distance of one length unit. More... | |
| std::auto_ptr< H3D::SFBool > | updateBackground |
| The background image (depthDataBackground) will be updated if this field is set to true. More... | |
| std::auto_ptr< H3D::SFFloat > | maximumBackgroundDistance |
| This is the largest distance that the background image may contain. More... | |
| std::auto_ptr< H3D::SFFloat > | backgroundDepthMargin |
| This is a margin removed from the depth when specifying the background, in meters. More... | |
| std::auto_ptr< H3D::SFInt32 > | backgroundPixelMargin |
| This is the margin around object when specifying the background, in pixels. More... | |
| std::auto_ptr< SFImage > | depthData |
| This is the depth data from the depth camera, in meters. More... | |
| std::auto_ptr< SFPositionImage > | positionData |
| This is the 3D pixel position data from the depth camera, in meters and camera coordinates. More... | |
| std::auto_ptr< SFBackgroundImage > | depthDataBackground |
| The depth camera holds a background image to more easily remove uninteresting data. More... | |
| std::auto_ptr< SFPaintTexture > | debugTexture |
| When specified, debug data are drawn to this texture. More... | |
Static Public Attributes | |
| static H3D::H3DNodeDatabase | database |
| Static Public Attributes inherited from HVR::DepthCamera | |
| static H3D::H3DNodeDatabase | database |
Additional Inherited Members | |
| Protected Member Functions inherited from HVR::DepthCamera | |
| void | update_debug_texture () |
| Protected Attributes inherited from HVR::DepthCamera | |
| struct HVR_API | ViewSize |
| struct HVR_API | SFBackgroundImage |
| struct HVR_API | SFPositionImage |
The depth camera uses an image to simulate a depth camera.
The image must have one single component of 32 bits floating point values which represent the depth in meters.
 1.8.6
1.8.6