The scenegraph TrackedTransform base. More...
#include <TrackedTransform.hh>
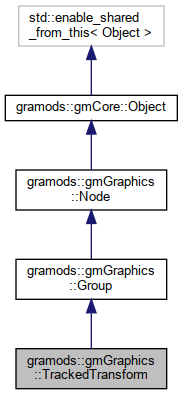
Inheritance diagram for gramods::gmGraphics::TrackedTransform:
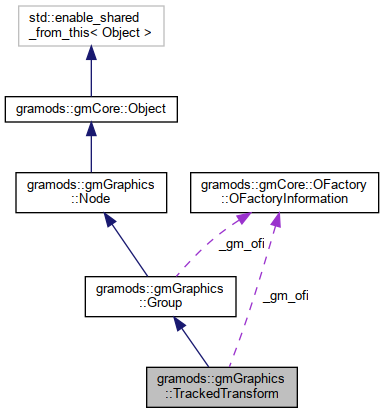
Collaboration diagram for gramods::gmGraphics::TrackedTransform:
Classes | |
| struct | Impl |
Public Member Functions | |
| void | setHysteresis (float t) |
| Sets the time, in seconds, a tracker lingers after ceasing to update their data, before it's removed. | |
| void | addSinglePoseTracker (std::shared_ptr< gmTrack::SinglePoseTracker > t) |
| Adds a tracker to read pose data from. | |
| void | addMultiPoseTracker (std::shared_ptr< gmTrack::MultiPoseTracker > t) |
| Adds a tracker to read pose data from. | |
| void | accept (Visitor *visitor) override |
| Calls the visitors apply method with this as argument. | |
 Public Member Functions inherited from gramods::gmGraphics::Group Public Member Functions inherited from gramods::gmGraphics::Group | |
| void | addNode (std::shared_ptr< Node > node) |
| Adds a child. | |
| void | removeNode (std::shared_ptr< Node > node) |
| Removes a child. | |
| void | removeNode (size_t idx) |
| Removes a child. | |
| std::vector< std::shared_ptr< Node > > | getNodes () |
| Returns the current list of nodes. | |
| void | traverse (Visitor *visitor) override |
| Propagates the specified visitor. | |
| Public Member Functions inherited from gramods::gmGraphics::Node | |
| virtual std::vector< float > | getIntersections (const IntersectionLine &line) |
| Check and return intersections between the provided line and the shape represented by this node. | |
| virtual std::string | getDefaultKey () override |
| Returns the default key, in Configuration, for the Object. | |
| Public Member Functions inherited from gramods::gmCore::Object | |
| Object () | |
| Initializes internal data. | |
| virtual | ~Object () |
| Cleaning up internal data. | |
| virtual void | initialize () |
| Called to initialize the Object. | |
| bool | isInitialized () |
| Returns true if the Object is initialized. | |
Static Public Attributes | |
| static gramods::gmCore::OFactory::OFactoryInformation | _gm_ofi |
| Static Public Attributes inherited from gramods::gmGraphics::Group | |
| static gramods::gmCore::OFactory::OFactoryInformation | _gm_ofi |
Additional Inherited Members | |
| Public Types inherited from gramods::gmGraphics::Node | |
| typedef std::vector< std::shared_ptr< Node > > | list |
Detailed Description
The scenegraph TrackedTransform base.
Member Function Documentation
◆ accept()
|
overridevirtual |
Calls the visitors apply method with this as argument.
Reimplemented from gramods::gmCore::Object.
◆ addMultiPoseTracker()
| void gramods::gmGraphics::TrackedTransform::addMultiPoseTracker | ( | std::shared_ptr< gmTrack::MultiPoseTracker > | t | ) |
Adds a tracker to read pose data from.
◆ addSinglePoseTracker()
| void gramods::gmGraphics::TrackedTransform::addSinglePoseTracker | ( | std::shared_ptr< gmTrack::SinglePoseTracker > | t | ) |
Adds a tracker to read pose data from.
◆ setHysteresis()
| void gramods::gmGraphics::TrackedTransform::setHysteresis | ( | float | t | ) |
Sets the time, in seconds, a tracker lingers after ceasing to update their data, before it's removed.
Default is 5 seconds.
The documentation for this class was generated from the following files:
- /home/karlu/private/program/gramods/modules/gmGraphics/include/gmGraphics/TrackedTransform.hh
- /home/karlu/private/program/gramods/modules/gmGraphics/src/TrackedTransform.cpp