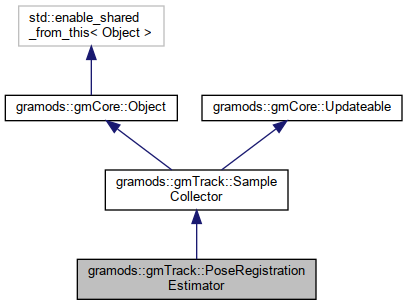
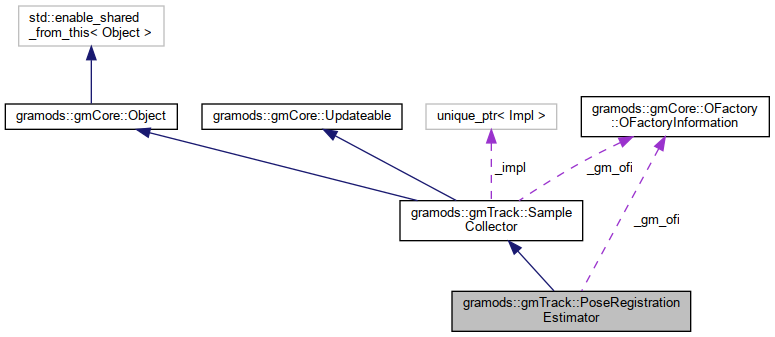
The PoseRegistrationEstimator is a utility for estimating the base of a tracking system's coordinates, i e registration of the tracking system into room or display system coordinates. More...
#include <PoseRegistrationEstimator.hh>
Classes | |
| struct | Impl |
Public Member Functions | |
| void | addActualPosition (Eigen::Vector3f p) |
| Adds a known calibration point, in room coordinates. | |
| void | performRegistration () |
| Force registration estimation. | |
| bool | getRegistration (Eigen::Matrix4f *RAW, Eigen::Matrix4f *UNIT) |
| Extract registration matrix, either raw or without scaling. | |
 Public Member Functions inherited from gramods::gmTrack::SampleCollector Public Member Functions inherited from gramods::gmTrack::SampleCollector | |
| SampleCollector (Impl *impl=nullptr) | |
| void | update (clock::time_point time, size_t frame) |
| Updates the internal states. | |
| void | setController (std::shared_ptr< Controller > controller) |
| Sets the controller to use for reading tracker samples. | |
| void | addTrackerPosition (Eigen::Vector3f p) |
| Adds a tracker position. | |
| void | addTrackerOrientation (Eigen::Quaternionf o) |
| Adds a tracker orientation. | |
| void | setSamplesPerSecond (float n) |
| Sets the frequency at which samples are collected when the controller button is pressed. | |
| void | setWarningThreshold (float d) |
| Sets the data offset required to trigger a warning. | |
| void | setInlierThreshold (float r) |
| Set the maximum positional distance from the average allowed for a sample to be included in the average. | |
| void | setOrientationWarningThreshold (float d) |
| Sets the data offset required to trigger a warning. | |
| void | setOrientationInlierThreshold (float r) |
| Set the maximum orientational distance (in radians) from the average allowed for a sample to be included in the average. | |
| const std::vector< Eigen::Vector3f > & | getTrackerPositions () const |
| Returns the current list of tracker positions. | |
| const std::vector< Eigen::Quaternionf > & | getTrackerOrientations () const |
| Returns the current list of tracker orientations. | |
| void | traverse (Visitor *visitor) override |
| Propagates the specified visitor. | |
| Public Member Functions inherited from gramods::gmCore::Object | |
| Object () | |
| Initializes internal data. | |
| virtual | ~Object () |
| Cleaning up internal data. | |
| virtual void | initialize () |
| Called to initialize the Object. | |
| virtual void | accept (Visitor *visitor) |
| Calls the visitors apply method with this as argument. | |
| virtual std::string | getDefaultKey () |
| Returns the default key for the Object when automatically instantiated in a Configuration, i.e. | |
| bool | isInitialized () |
| Returns true if the Object is initialized. | |
| Public Member Functions inherited from gramods::gmCore::Updateable | |
| Updateable (int priority=0) | |
| Configures the Updateable properties to the specified priority. | |
Static Public Attributes | |
| static gramods::gmCore::OFactory::OFactoryInformation | _gm_ofi |
| Static Public Attributes inherited from gramods::gmTrack::SampleCollector | |
| static gramods::gmCore::OFactory::OFactoryInformation | _gm_ofi |
Additional Inherited Members | |
| Public Types inherited from gramods::gmCore::Updateable | |
| typedef std::chrono::steady_clock | clock |
| Static Public Member Functions inherited from gramods::gmTrack::SampleCollector | |
| static Eigen::Vector3f | getAverage (std::vector< Eigen::Vector3f > samples, float *stddev=nullptr, float *maxdev=nullptr, float inlier_dist=-1.f, size_t *inlier_count=nullptr) |
| Calculates and returns the average point of a set of samples. | |
| static Eigen::Quaternionf | getAverage (std::vector< Eigen::Quaternionf > samples, float *stddev=nullptr, float *maxdev=nullptr, float inlier_dist=-1.f, size_t *inlier_count=nullptr) |
| Calculates and returns the average point of a set of samples. | |
| Static Public Member Functions inherited from gramods::gmCore::Updateable | |
| static void | updateAll (clock::time_point t=clock::now(), std::optional< size_t > frame=std::nullopt) |
| Updates all currently instanciated updateable objects. | |
| Protected Attributes inherited from gramods::gmTrack::SampleCollector | |
| std::unique_ptr< Impl > | _impl |
Detailed Description
The PoseRegistrationEstimator is a utility for estimating the base of a tracking system's coordinates, i e registration of the tracking system into room or display system coordinates.
The utility is used by marking, with the tracking device, the position of known, pre-specified positions in the room or display system.
Member Function Documentation
◆ addActualPosition()
| void gramods::gmTrack::PoseRegistrationEstimator::addActualPosition | ( | Eigen::Vector3f | p | ) |
Adds a known calibration point, in room coordinates.
XML-attribute: actualPosition
◆ getRegistration()
| bool gramods::gmTrack::PoseRegistrationEstimator::getRegistration | ( | Eigen::Matrix4f * | RAW, |
| Eigen::Matrix4f * | UNIT | ||
| ) |
Extract registration matrix, either raw or without scaling.
Returns true if there is a registration, false otherwise.
◆ performRegistration()
| void gramods::gmTrack::PoseRegistrationEstimator::performRegistration | ( | ) |
Force registration estimation.
This is needed only if the component is used non-interactively.
The documentation for this class was generated from the following files:
- /home/karlu/private/program/gramods/modules/gmTrack/include/gmTrack/PoseRegistrationEstimator.hh
- /home/karlu/private/program/gramods/modules/gmTrack/src/PoseRegistrationEstimator.cpp