|
|
typedef gmCore::Updateable::clock | clock |
| |
|
typedef gmCore::Updateable::clock | clock |
| |
|
| void | update (clock::time_point t) override |
| |
|
float | estimateSphericity (std::vector< Eigen::Vector3f > samples) |
| |
|
void | performRegistration () |
| |
| void | expandPlanar (std::vector< Eigen::Vector3f > &data, int &idx0, int &idx1) |
| | Identifies the degenerate dimension and copies the data into two sets distributed in this dimension.
|
| |
|
bool | estimateRegistration (const std::vector< Eigen::Vector3f > &tracker_data, const std::vector< Eigen::Vector3f > &actual_data, Eigen::Matrix4f &M) |
| |
|
void | estimateUnitRegistration (const std::vector< Eigen::Vector3f > &tracker_data, const std::vector< Eigen::Vector3f > &actual_data, const Eigen::Matrix4f &M_raw, Eigen::Matrix4f &M_unit) |
| |
|
void | checkResult (const std::vector< Eigen::Vector3f > &tracker_data, const std::vector< Eigen::Vector3f > &actual_data, const Eigen::Matrix4f &M_unit, std::string type) |
| |
|
|
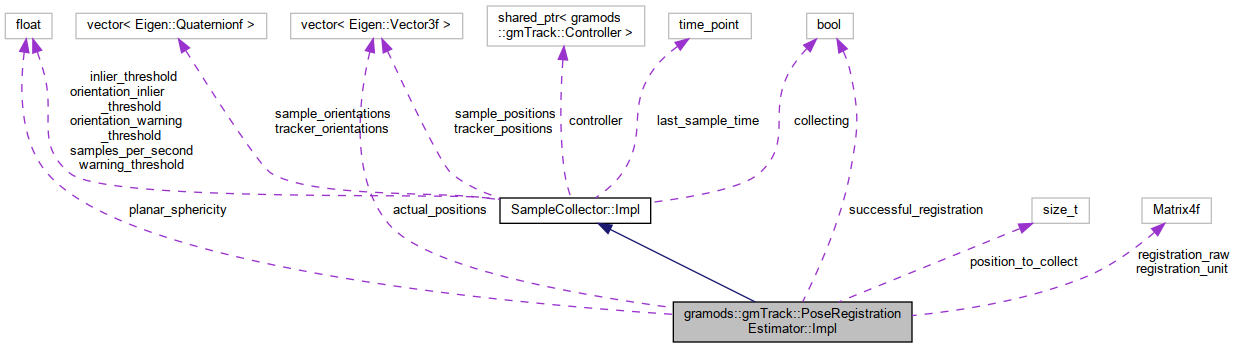
std::vector< Eigen::Vector3f > | actual_positions |
| |
|
float | planar_sphericity = 0.3f |
| |
|
Eigen::Matrix4f | registration_raw |
| |
|
Eigen::Matrix4f | registration_unit |
| |
|
bool | successful_registration = false |
| |
|
size_t | position_to_collect = std::numeric_limits<size_t>::max() |
| |
|
std::vector< Eigen::Vector3f > | tracker_positions |
| |
|
std::vector< Eigen::Quaternionf > | tracker_orientations |
| |
|
std::vector< Eigen::Vector3f > | sample_positions |
| |
|
std::vector< Eigen::Quaternionf > | sample_orientations |
| |
|
clock::time_point | last_sample_time = clock::time_point::min() |
| |
|
float | samples_per_second = 1 |
| |
|
float | warning_threshold = 0.01f |
| |
|
float | orientation_warning_threshold = GM_PI_4 |
| |
|
bool | collecting = false |
| |
|
float | inlier_threshold = -1.f |
| |
|
float | orientation_inlier_threshold = -1.f |
| |
|
std::shared_ptr< gramods::gmTrack::Controller > | controller |
| |
◆ expandPlanar()
| void gramods::gmTrack::PoseRegistrationEstimator::Impl::expandPlanar |
( |
std::vector< Eigen::Vector3f > & |
data, |
|
|
int & |
idx0, |
|
|
int & |
idx1 |
|
) |
| |
Identifies the degenerate dimension and copies the data into two sets distributed in this dimension.
- Parameters
-
| idx0 | If larger than or equal to zero, specifies the index of the first data point that should be used to identify the orientation of the data, otherwise set to that index. |
| idx1 | Specifies the index of the second data point that should be used to identify the orientation of the data, alternatively set to that index. |
◆ update()
| void gramods::gmTrack::PoseRegistrationEstimator::Impl::update |
( |
clock::time_point |
t | ) |
|
|
overridevirtual |
The documentation for this struct was generated from the following file:
- /home/karlu/private/program/gramods/modules/gmTrack/src/PoseRegistrationEstimator.cpp
 Public Types inherited from SampleCollector::Impl
Public Types inherited from SampleCollector::Impl