This class sets up a VRPN server that post data from AnalogsTracker, ButtonsTracker, SinglePoseTracker and MultiPoseTracker instances. More...
#include <VrpnServer.hh>

Classes | |
| struct | Impl |
Public Member Functions | |
| void | update (gmCore::Updateable::clock::time_point time, size_t frame) override |
| Reads off analogs, buttons and pose data, and send these through the VRPN server. | |
| void | initialize () override |
| Sets up the server. | |
| void | setPort (int port) |
| Sets the port to bind the VRPN server to. | |
| void | addTrackerName (std::string name) |
| Add a name to associate with a tracker in this VRPN server. | |
| void | addAnalogsTracker (std::shared_ptr< AnalogsTracker > t) |
| Add an AnalogsTracker to serve from this VRPN server. | |
| void | addButtonsTracker (std::shared_ptr< ButtonsTracker > t) |
| Add a ButtonsTracker to serve from this VRPN server. | |
| void | addMultiPoseTracker (std::shared_ptr< MultiPoseTracker > t) |
| Add a MultiPoseTracker to serve from this VRPN server. | |
| void | addSinglePoseTracker (std::shared_ptr< SinglePoseTracker > t) |
| Add a SinglePoseTracker to serve from this VRPN server. | |
| void | traverse (Visitor *visitor) override |
| Propagates the specified visitor. | |
 Public Member Functions inherited from gramods::gmCore::Object Public Member Functions inherited from gramods::gmCore::Object | |
| Object () | |
| Initializes internal data. | |
| virtual | ~Object () |
| Cleaning up internal data. | |
| virtual void | accept (Visitor *visitor) |
| Calls the visitors apply method with this as argument. | |
| virtual std::string | getDefaultKey () |
| Returns the default key for the Object when automatically instantiated in a Configuration, i.e. | |
| bool | isInitialized () |
| Returns true if the Object is initialized. | |
| Public Member Functions inherited from gramods::gmCore::Updateable | |
| Updateable (int priority=0) | |
| Configures the Updateable properties to the specified priority. | |
| virtual void | update (clock::time_point t, size_t frame)=0 |
| Called by updateAll to make the object up-to-date. | |
Static Public Attributes | |
| static gramods::gmCore::OFactory::OFactoryInformation | _gm_ofi |
Additional Inherited Members | |
| Public Types inherited from gramods::gmCore::Updateable | |
| typedef std::chrono::steady_clock | clock |
| Static Public Member Functions inherited from gramods::gmCore::Updateable | |
| static void | updateAll (clock::time_point t=clock::now(), std::optional< size_t > frame=std::nullopt) |
| Updates all currently instanciated updateable objects. | |
Detailed Description
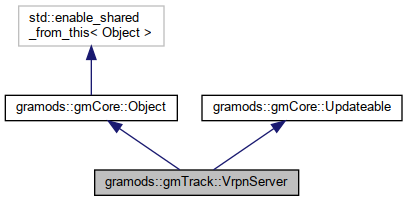
This class sets up a VRPN server that post data from AnalogsTracker, ButtonsTracker, SinglePoseTracker and MultiPoseTracker instances.
This class configures as an Updateable with a priority of -100. Either Updateable::updateAll or update must be called at even intervals. This is done automatically by gm-load.
Member Function Documentation
◆ addAnalogsTracker()
| void gramods::gmTrack::VrpnServer::addAnalogsTracker | ( | std::shared_ptr< AnalogsTracker > | t | ) |
Add an AnalogsTracker to serve from this VRPN server.
There must be exactly one name for each tracker served.
◆ addButtonsTracker()
| void gramods::gmTrack::VrpnServer::addButtonsTracker | ( | std::shared_ptr< ButtonsTracker > | t | ) |
Add a ButtonsTracker to serve from this VRPN server.
There must be exactly one name for each tracker served.
◆ addMultiPoseTracker()
| void gramods::gmTrack::VrpnServer::addMultiPoseTracker | ( | std::shared_ptr< MultiPoseTracker > | t | ) |
Add a MultiPoseTracker to serve from this VRPN server.
There must be exactly one name for each tracker served.
◆ addSinglePoseTracker()
| void gramods::gmTrack::VrpnServer::addSinglePoseTracker | ( | std::shared_ptr< SinglePoseTracker > | t | ) |
Add a SinglePoseTracker to serve from this VRPN server.
There must be exactly one name for each tracker served.
◆ addTrackerName()
| void gramods::gmTrack::VrpnServer::addTrackerName | ( | std::string | name | ) |
Add a name to associate with a tracker in this VRPN server.
There must be exactly one name for each tracker served.
◆ initialize()
|
overridevirtual |
◆ setPort()
| void gramods::gmTrack::VrpnServer::setPort | ( | int | port | ) |
Sets the port to bind the VRPN server to.
XML-attribute: port
◆ traverse()
|
overridevirtual |
Propagates the specified visitor.
- See also
- Object::Visitor
Reimplemented from gramods::gmCore::Object.
◆ update()
|
override |
Reads off analogs, buttons and pose data, and send these through the VRPN server.
The documentation for this class was generated from the following files:
- /home/karlu/private/program/gramods/modules/gmTrack/include/gmTrack/VrpnServer.hh
- /home/karlu/private/program/gramods/modules/gmTrack/src/VrpnServer.cpp