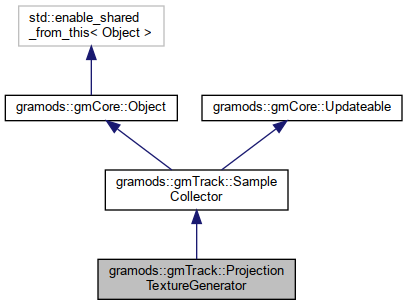
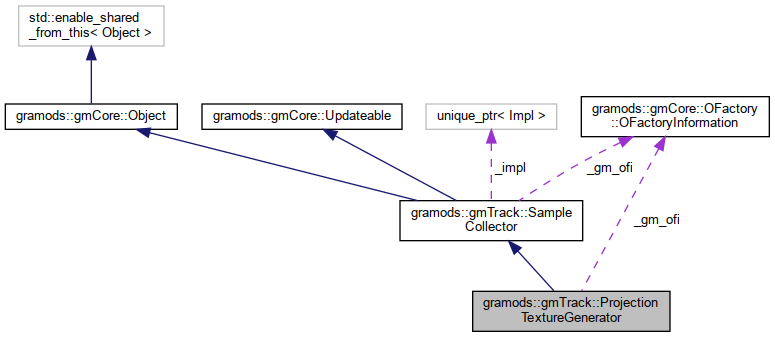
The ProjectionTextureGenerator is a utility for generating a projection texture for gmGraphics::TextureProjectedView. More...
#include <ProjectionTextureGenerator.hh>
Classes | |
| struct | Impl |
Public Member Functions | |
| void | setResolution (gmCore::size2 res) |
| Set the resolution of the output image. | |
| void | addRegion (size_t order=1) |
| Creates a new region for the following calls to addBufferPosition, and optionally also sets its polynomial order. | |
| void | addBufferPosition (Eigen::Vector2f p) |
| Adds a known calibration point, in room coordinates. | |
| void | addHullIndex (size_t idx) |
| Adds a point, referenced by index, from the buffer position list to the list of hull points for the current region. | |
| void | addHullPosition (Eigen::Vector2f p) |
| Adds a point to the list of hull points for the current region. | |
| void | setFile (std::filesystem::path file) |
| Sets the file path to save the view to. | |
| void | saveImage () |
| Save the final image to the specified file. | |
| Eigen::Vector3f | getOffset () |
| Returns the offset needed to convert the image pixel values in the last generated image to their respective 3D position. | |
| Eigen::Vector3f | getScale () |
| Returns the scale needed to convert the image pixel values in the last generated image to their respective 3D position. | |
 Public Member Functions inherited from gramods::gmTrack::PoseSampleCollector Public Member Functions inherited from gramods::gmTrack::PoseSampleCollector | |
| PoseSampleCollector (Impl *impl=nullptr) | |
| void | update (clock::time_point time, size_t frame) |
| Updates the internal states. | |
| void | setController (std::shared_ptr< Controller > controller) |
| Sets the controller to use for reading tracker samples. | |
| void | addTrackerPosition (Eigen::Vector3f p) |
| Adds a tracker position. | |
| void | addTrackerOrientation (Eigen::Quaternionf o) |
| Adds a tracker orientation. | |
| void | setSamplesPerSecond (float n) |
| Sets the frequency at which samples are collected when the controller button is pressed. | |
| void | setWarningThreshold (float d) |
| Sets the data offset required to trigger a warning. | |
| void | setInlierThreshold (float r) |
| Set the maximum positional distance from the average allowed for a sample to be included in the average. | |
| void | setOrientationWarningThreshold (float d) |
| Sets the data offset required to trigger a warning. | |
| void | setOrientationInlierThreshold (float r) |
| Set the maximum orientational distance (in radians) from the average allowed for a sample to be included in the average. | |
| const std::vector< Eigen::Vector3f > & | getTrackerPositions () const |
| Returns the current list of tracker positions. | |
| const std::vector< Eigen::Quaternionf > & | getTrackerOrientations () const |
| Returns the current list of tracker orientations. | |
| void | traverse (Visitor *visitor) override |
| Propagates the specified visitor. | |
| Public Member Functions inherited from gramods::gmCore::Object | |
| Object () | |
| Initializes internal data. | |
| virtual | ~Object () |
| Cleaning up internal data. | |
| virtual void | initialize () |
| Called to initialize the Object. | |
| virtual void | accept (Visitor *visitor) |
| Calls the visitors apply method with this as argument. | |
| virtual std::string | getDefaultKey () |
| Returns the default key for the Object when automatically instantiated in a Configuration, i.e. | |
| bool | isInitialized () |
| Returns true if the Object is initialized. | |
| Public Member Functions inherited from gramods::gmCore::Updateable | |
| Updateable (int priority=0) | |
| Configures the Updateable properties to the specified priority. | |
Static Public Attributes | |
| static gramods::gmCore::OFactory::OFactoryInformation | _gm_ofi |
| Static Public Attributes inherited from gramods::gmTrack::PoseSampleCollector | |
| static gramods::gmCore::OFactory::OFactoryInformation | _gm_ofi |
Additional Inherited Members | |
| Public Types inherited from gramods::gmCore::Updateable | |
| typedef std::chrono::steady_clock | clock |
| Static Public Member Functions inherited from gramods::gmTrack::PoseSampleCollector | |
| static Eigen::Vector3f | getAverage (std::vector< Eigen::Vector3f > samples, float *stddev=nullptr, float *maxdev=nullptr, float inlier_dist=-1.f, size_t *inlier_count=nullptr) |
| Calculates and returns the average point of a set of samples. | |
| static Eigen::Quaternionf | getAverage (std::vector< Eigen::Quaternionf > samples, float *stddev=nullptr, float *maxdev=nullptr, float inlier_dist=-1.f, size_t *inlier_count=nullptr) |
| Calculates and returns the average point of a set of samples. | |
| Static Public Member Functions inherited from gramods::gmCore::Updateable | |
| static void | updateAll (clock::time_point t=clock::now(), std::optional< size_t > frame=std::nullopt) |
| Updates all currently instanciated updateable objects. | |
| Protected Attributes inherited from gramods::gmTrack::PoseSampleCollector | |
| std::unique_ptr< Impl > | _impl |
Detailed Description
The ProjectionTextureGenerator is a utility for generating a projection texture for gmGraphics::TextureProjectedView.
The utility is used by marking, with the tracking device, the position of known, pre-specified positions in the room or display system.
Member Function Documentation
◆ addBufferPosition()
| void gramods::gmTrack::ProjectionTextureGenerator::addBufferPosition | ( | Eigen::Vector2f | p | ) |
Adds a known calibration point, in room coordinates.
If positions are added without first specifying polynomial order (see addRegion), then order 1 will be used.
XML-attribute: bufferPosition
◆ addHullIndex()
| void gramods::gmTrack::ProjectionTextureGenerator::addHullIndex | ( | size_t | idx | ) |
Adds a point, referenced by index, from the buffer position list to the list of hull points for the current region.
A list of hull points that enclose the region is necessary when more than one region is defined. This starts at zero for each region.
XML-attribute: hullPoint
◆ addHullPosition()
| void gramods::gmTrack::ProjectionTextureGenerator::addHullPosition | ( | Eigen::Vector2f | p | ) |
Adds a point to the list of hull points for the current region.
A list of hull points that enclose the region is necessary when more than one region is defined.
XML-attribute: hullPoint
◆ addRegion()
| void gramods::gmTrack::ProjectionTextureGenerator::addRegion | ( | size_t | order = 1 | ) |
Creates a new region for the following calls to addBufferPosition, and optionally also sets its polynomial order.
Use the regions to separate between geometrically smooth projection areas with discontinuities in between. Typically projection surfaces are flat (order = 1) or spherical/cylindrical (order = 2). If positions are added without specifying polynomial order, then order 1 will be used.
- Parameters
-
order The polynomial order of the region.
XML-attribute: region
◆ getOffset()
| Eigen::Vector3f gramods::gmTrack::ProjectionTextureGenerator::getOffset | ( | ) |
Returns the offset needed to convert the image pixel values in the last generated image to their respective 3D position.
◆ getScale()
| Eigen::Vector3f gramods::gmTrack::ProjectionTextureGenerator::getScale | ( | ) |
Returns the scale needed to convert the image pixel values in the last generated image to their respective 3D position.
◆ saveImage()
| void gramods::gmTrack::ProjectionTextureGenerator::saveImage | ( | ) |
Save the final image to the specified file.
Since the RGB values of the image will be in the range 0-1, a scale and offset for these values will also be computed.
◆ setFile()
| void gramods::gmTrack::ProjectionTextureGenerator::setFile | ( | std::filesystem::path | file | ) |
Sets the file path to save the view to.
This generator will save the image in TIFF format (32 bit float RGB encoding XYZ) so if the specified path does not include a .tif suffix then one will be added.
XML-attribute: file
◆ setResolution()
| void gramods::gmTrack::ProjectionTextureGenerator::setResolution | ( | gmCore::size2 | res | ) |
Set the resolution of the output image.
The documentation for this class was generated from the following files:
- /home/karlu/private/program/gramods/modules/gmTrack/include/gmTrack/ProjectionTextureGenerator.hh
- /home/karlu/private/program/gramods/modules/gmTrack/src/ProjectionTextureGenerator.cpp